Course Projects

IRL Project: HINTeract-Hint-Driven Hierarchical Learning for Robotic Furniture Assembly
Built a modular HRL framework where a Sawyer arm requests on-demand human hints to grasp, align, and insert parts, achieving sample-efficient toy-table assembly in Robosuite with 260 expert demos and open-sourced code.
View Project
MRS Project: CableCrop RL-Multi-Cable Robot Planning for Agricultural Data Capture
Designed a coordinated RGB+hyperspectral cable-robot pair and trained PPO/MAPPO agents in simulation to maximize crop coverage and data richness while dodging collisions for scalable precision-ag monitoring.
View Project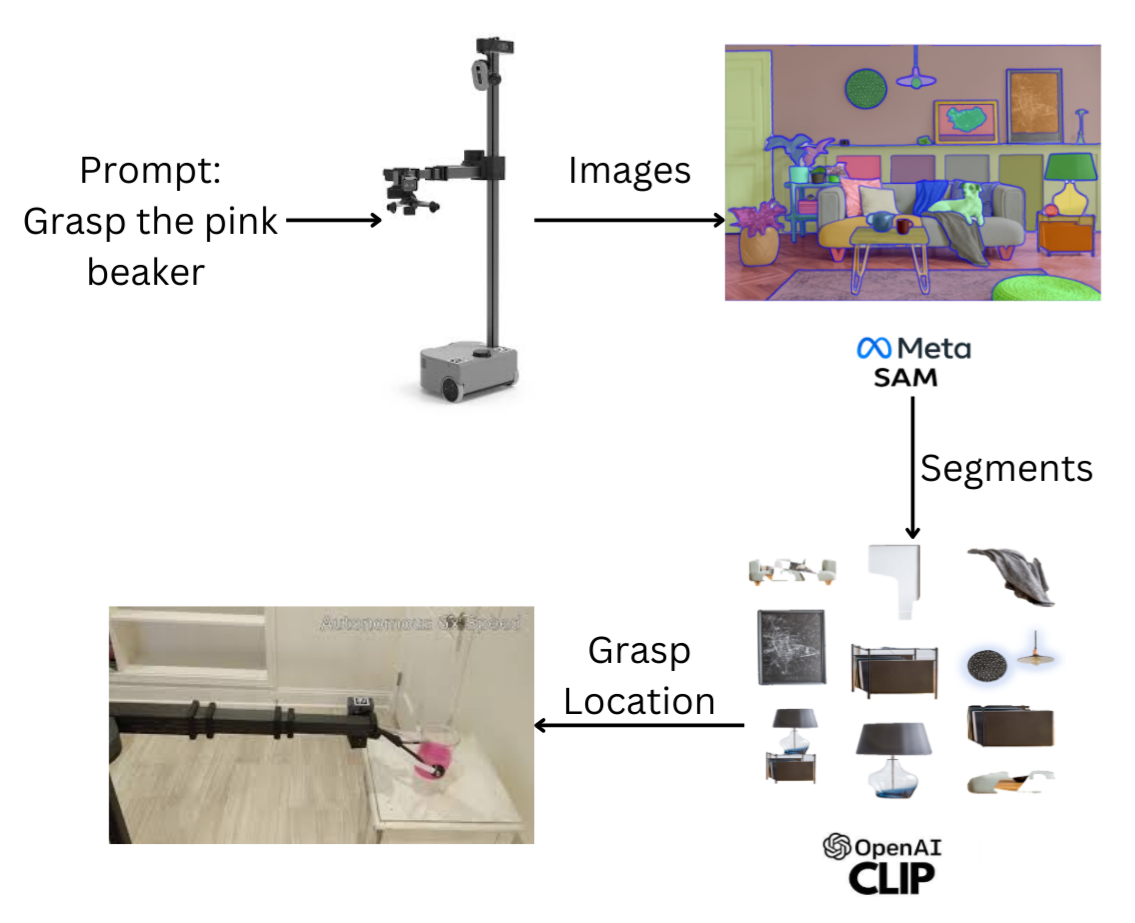
HRI Project: LM-NavGrasp-Language-Guided Navigation & Grasping on Hello Robot Stretch
Developed a pipeline that fuses large vision-language models (CLIP + SAM) with ROS-Nav so Stretch can parse a natural-language object description, autonomously navigate to the correct table, and execute a grasp on the specified item in cluttered lab scenes.
View Project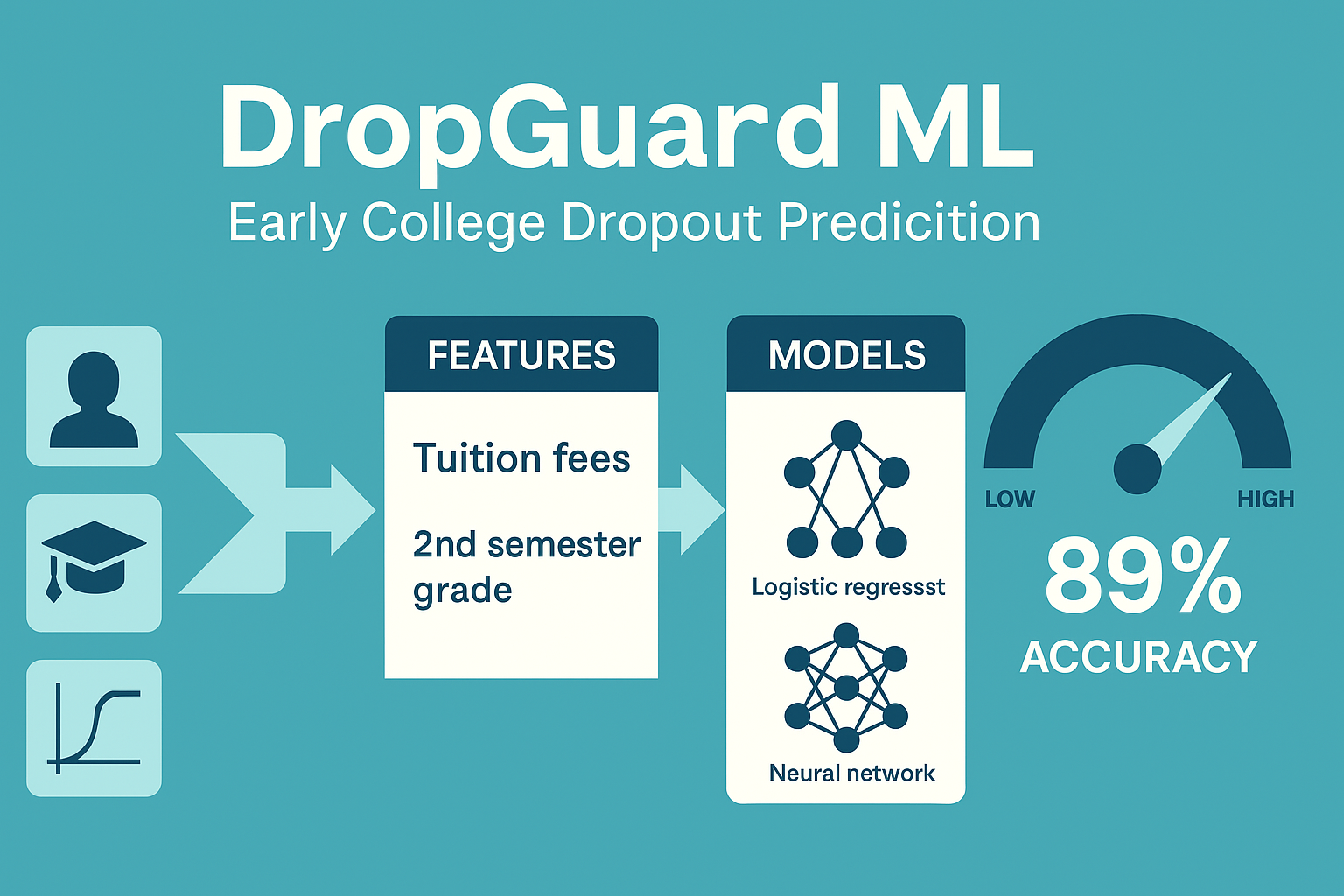
ML Project: Student dropout predictive ML model
Condensed a 4.4 k-student, 35-feature Portuguese dataset with PCA and trained logistic regression, random forest, and neural nets-best 89% accuracy-to highlight tuition status and 2nd-semester grades as key risk signals for targeted retention action.
View Project